Publications
Indexed publications are also available at my ORCID record.

Artificial Intelligence-Based Challenges as an Educational Tool in Aerospace Engineering: the u3S Laboratory Experience
A. Lotti, D. Modenini
Presented at the 2nd IFAC Workshop on Aerospace Control Education, Bertinoro, Italy, July 22-24, 2024. Published in IFAC-PapersOnLine, vol. 58, pp. 65–70, 2024, DOI
This manuscript highlights the positive impact of AI-based challenges on education and research at the u3S laboratory, University of Bologna, within aerospace engineering degree programs. It discusses three examples from recent academic years, showcasing the benefits and challenges of using AI competitions as hands-on learning tools for final projects.
Estimating Soil Parameters From Hyperspectral Images: A Benchmark Dataset and the Outcome of the HYPERVIEW Challenge Journal
J. Nalepa, L. Tulczyjew, B. Le Saux, N. Longépé, B. Ruszczak, A. M. Wijata, K. Smykala, M. Myller, M. Kawulok, R. S. Kuzu, F. Albrecht, C. Arnold, M. Alasawedah, S. Angeli, D. Nobileau, A. Ballabeni, A. Lotti, A. Locarini, D. Modenini, P. Tortora, M. Gumiela
IEEE Geoscience and Remote Sensing Magazine, 2024, DOI
Improving agricultural practices with AI and Earth observation is crucial for farm sustainability. Non-invasive soil parameter estimation using hyperspectral images can optimize fertilization. However, inconsistent validation across datasets hinders comparison. To address this, we present an AI-ready dataset with airborne hyperspectral images and in-situ soil measurements, along with a standardized validation procedure. This dataset was used in the HYPERVIEW challenge, aiming to advance soil analysis algorithms for satellite deployment. We discuss the challenge's outcomes and offer a reproducible dataset for future research in AI-driven soil analysis.
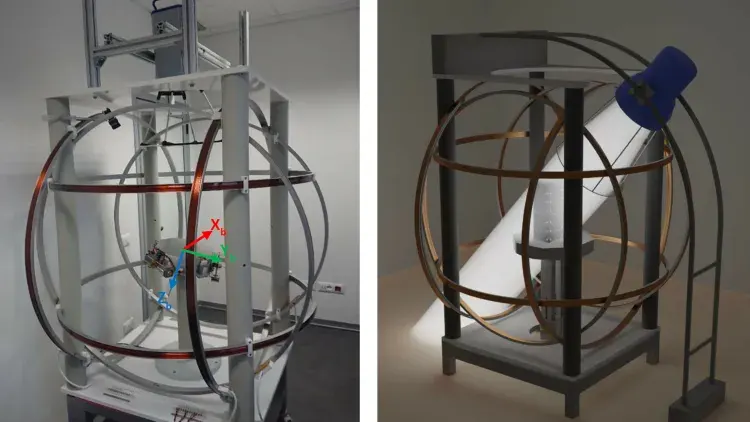
The Nanosatellite-Class Attitude Control Facility at ESA-ESTEC
A. Curatolo, D. Modenini, G. Curzi, A. Lotti, D. Pecorella, E. Strollo, A. Locarini, A. Hyslop, D. Oddenino
Presented at the Joint 10th EUCASS – 9th CEAS, Lausanne, Switzerland, July 9-13, 2023, DOI
The University of Bologna and Nautilus, in collaboration with ESA, are developing a facility to test nanosatellites' attitude determination and control systems. This facility, to be installed in ESTEC, aims to verify closed-loop attitude control using physical sensor stimuli. The testing environment is expected to uncover issues not typically identified in the compressed verification campaigns of the New-Space approach. The manuscript provides insights into the project status, emphasizing key requirements and design choices.
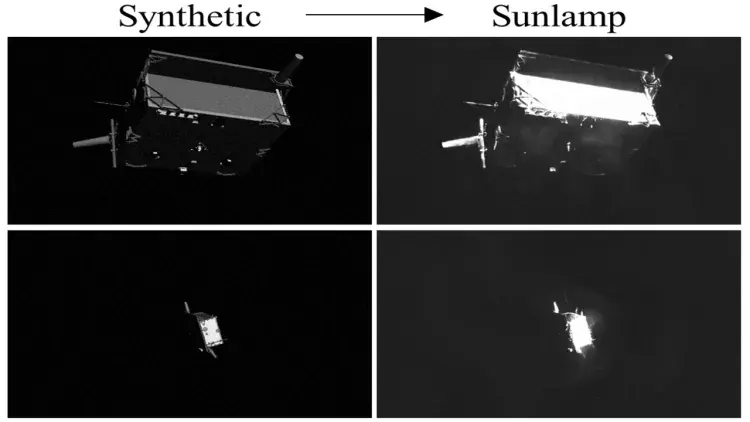
Improving Satellite Pose Estimation Across Domain Gap with Generative Adversarial Networks
A. Lotti
Presented at the 3rd AIDAA Aerospace PhD Days, Bertinoro, Italy, April 16-19, 2023. Published in Aerospace Science and Engineering – III Aerospace PhD-Days, pp. 376–381, 2023, DOI
This study addresses the challenge of pose estimation for in-orbit servicing missions using a monocular camera. Synthetic images are commonly used due to impracticalities in collecting real datasets in space, but a significant domain gap exists. The research explores the use of generative adversarial networks to make synthetic images more realistic.
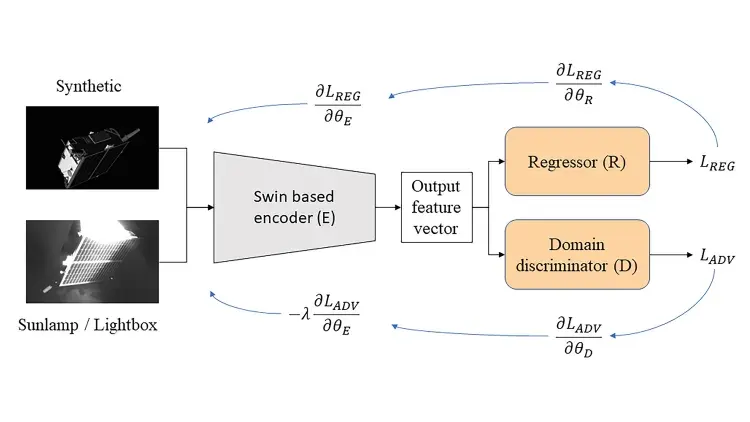
Investigating Vision Transformers for Bridging Domain Gap in Satellite Pose Estimation
A. Lotti, D. Modenini, P. Tortora
Presented at the 2nd International Conference on Applied Intelligence and Informatics - The use of Artificial Intelligence for Space Application, Reggio Calabria, Italy, September 1-3, 2022. Published in Studies in Computational Intelligence, vol. 1088, pp. 299–314, 2023, DOI
The paper explores the application of vision Transformers, specifically Swin Transformers, for autonomous onboard pose estimation in space missions. Addressing challenges faced by neural networks, the study details an algorithm incorporating Swin Transformers and adversarial domain adaptation. Notably, this algorithm secured the fourth and fifth positions in the ESA's Satellite Pose Estimation Competition 2021. The research emphasizes the impact of larger models and data augmentations on accuracy. Additionally, a lightweight variant is proposed to overcome limitations without access to test images.
Deep Learning for Real-Time Satellite Pose Estimation on Tensor Processing Units Journal
A. Lotti, D. Modenini, P. Tortora, M. A. Perino, M. Saponara
Journal of Spacecraft and Rockets, vol. 60, no. 3, pp. 1034–1038, 2023, DOI
The paper introduces a pose estimation software for uncooperative space objects, leveraging monocular cameras and scalable neural network architectures. The software is designed for on-board implementation, compatible with low power Edge Tensor Processing Units. It achieves state-of-the-art accuracy on both the purposely developed Cosmo Photorealistic Dataset and the Spacecraft Pose Estimation Dataset.