Sentinel photorealistic dataset (SPD)
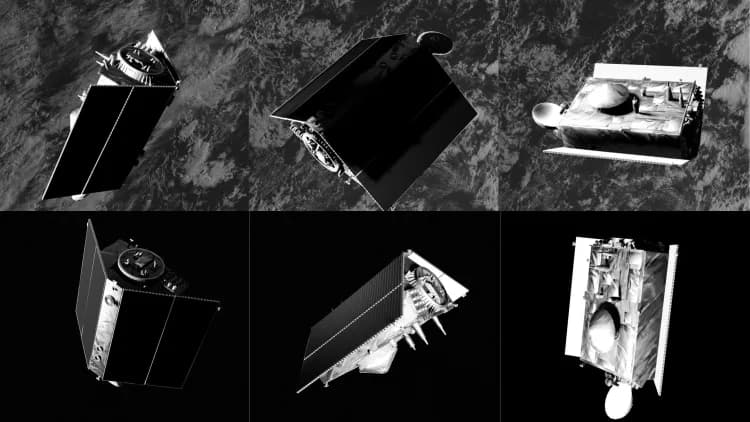
Random samples from the SPD dataset.
Dataset overview
The dataset consists of 1500 images depicting a Sentinel 6 satellite in random poses, illumination conditions, and backgrounds. The dataset has been developed in Blender. Image resolution is 800x800 px, and images are black and white. A simple pinhole camera model with no distortion has been employed for rendering the images.
The dataset package includes:
- Camera parameters.
- JSON log files featuring image poses, including relative camera-satellite position and attitude in the form of scalar-first quaternions.
- Wireframe satellite model.
- MATLAB script showing how to use the provided logfiles to plot keypoints over the images.
Minimum and maximum distance between the camera and the satellite is 12 and 15m. More information regarding the camera-satellite relative poses is provided in the figures below. The dataset is partitioned into train (1000), validation (250), and test (250).
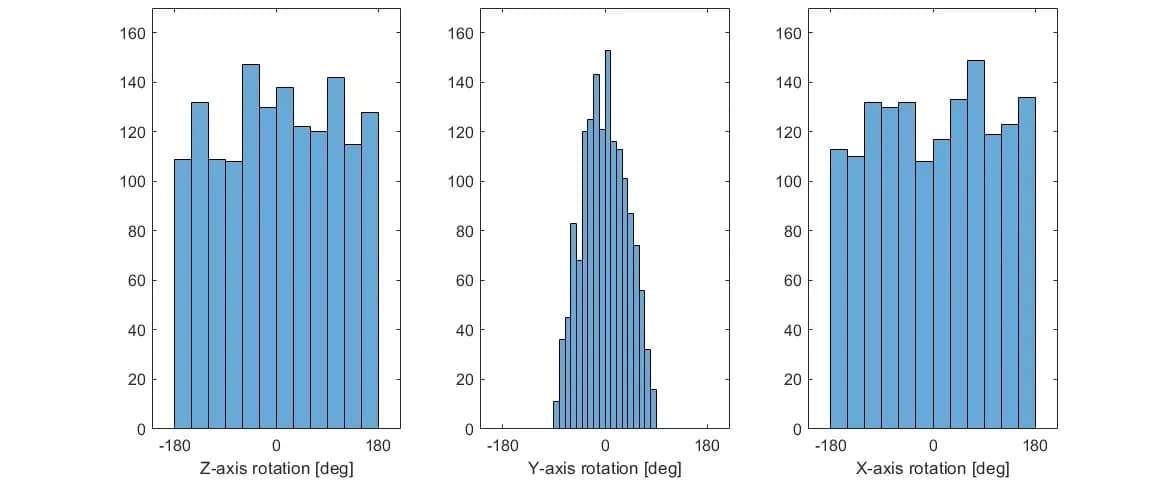
The attitude is randomly sampled from a uniform distribution of random rotations in the SO(3) space.
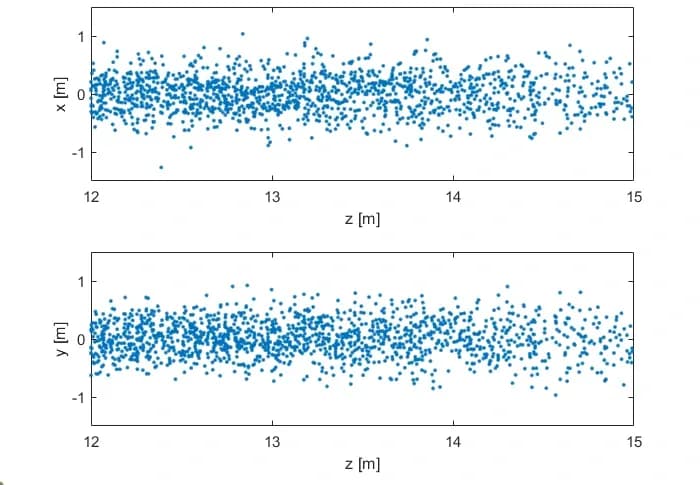
SPD position coordinates distribution.